LAPORAN AKHIR MODUL 4
- Mempermudah masuk pintu tanpa harus memegang ganggang pintu
- Menghemat waktu masuk ruangan








Resistor merupakan komponen elektronik yang memiliki dua pin dan didesain untuk mengatur tegangan listrik dan arus listrik. Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan hukum Ohm:

Resistor digunakan sebagai bagian dari rangkaian elektronik dan sirkuit elektronik, dan merupakan salah satu komponen yang paling sering digunakan. Resistor dapat dibuat dari bermacam-macam komponen dan film, bahkan kawat resistansi (kawat yang dibuat dari paduan resistivitas tinggi seperti nikel-kromium).
Karakteristik utama dari resistor adalah resistansinya dan daya listrik yang dapat dihantarkan. Karakteristik lain termasuk koefesian suhu, derau listrik (noise), dan induktansi.
Resistor dapat diintegrasikan kedalam sirkuit hibrida dan papan sirkuit cetak, bahkan sirkuit terpadu. Ukuran dan letak kaki bergantung pada desain sirkuit, kebutuhan daya resistor harus cukup dan disesuaikan dengan kebutuhan arus rangkaian agar tidak terbakar.
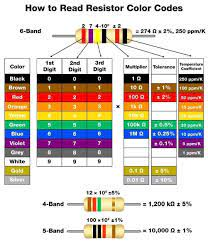
Toleransi resistor merupakan perubahan nilai resistansi dari nilai yang tercantum pada badan resistor yang masih diperbolehkan dan dinyatakan resistor dalam kondisi baik. Toleransi resistor merupakan salah satu perubahan karakteristik resistor yang terjadi akibat operasional resistor tersebut. Nilai toleransi resistor ini ada beberapa macam yaitu resistor dengan toleransi kerusakan 1% (resistor 1%), resistor dengan toleransi kesalahan 2% (resistor2%), resistor dengan toleransi kesalahan 5% (resistor 5%) dan resistor dengan toleransi 10% (resistor 10%).

- Resistor 4 gelang warna
Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
- Resistor 5 gelang warna
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
- Resistor 6 gelang warna
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
b. LDR (Light Dependent Resistor)
Light Dependent Resistor atau disingkat dengan LDR adalah jenis Resistor yang nilai hambatan atau nilai resistansinya tergantung pada intensitas cahaya yang diterimanya. Nilai Hambatan LDR akan menurun pada saat cahaya terang dan nilai Hambatannya akan menjadi tinggi jika dalam kondisi gelap. Dengan kata lain, fungsi LDR (Light Dependent Resistor) adalah untuk menghantarkan arus listrik jika menerima sejumlah intensitas cahaya (Kondisi Terang) dan menghambat arus listrik dalam kondisi gelap.
Prinsip kerja LDR sangat sederhana tak jauh berbeda dengan variable resistor pada umumnya. LDR dipasang pada berbagai macam rangkaian elektronika dan dapat memutus dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR maka nilai resistansinya akan menurun, dan sebaliknya semakin sedikit cahaya yang mengenai LDR maka nilai hambatannya akan semakin membesar. Naik turunnya nilai Hambatan akan sebanding dengan jumlah cahaya yang diterimanya. Pada umumnya, Nilai Hambatan LDR akan mencapai 200 Kilo Ohm (kΩ) pada kondisi gelap dan menurun menjadi 500 Ohm (Ω) pada Kondisi Cahaya Terang.
LDR (Light Dependent Resistor) yang merupakan Komponen Elektronika peka cahaya ini sering digunakan atau diaplikasikan dalam Rangkaian Elektronika sebagai sensor pada Lampu Penerang Jalan, Lampu Kamar Tidur, Rangkaian Anti Maling, Shutter Kamera, Alarm dan lain sebagainya.

- Bagian-Bagian LDR:

- Grafik respon LDR:

Cara Kerja Sensor Ultrasonik:
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.

Grafik Sensor :
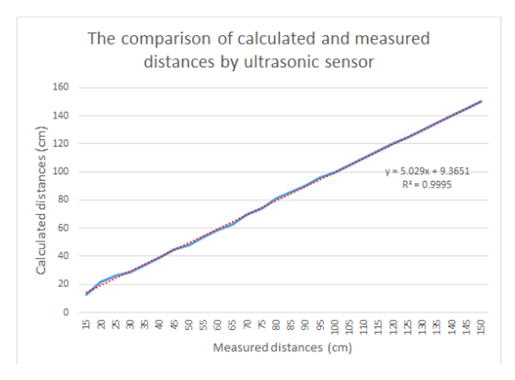
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
- Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
- Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
- Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
Adapun spesifikasi dari Arduino Uno ini adalah sebagai berikut :

Microcontroller ATmega328P |
Operating Voltage 5 V |
Input Voltage (recommended) 7 – 12 V |
Input Voltage (limit) 6 – 20 V |
Digital I/O Pins 14 (of which 6 provide PWM output) |
PWM Digital I/O Pins 6 |
Analog Input Pins 6 |
DC Current per I/O Pin 20 mA |
DC Current for 3.3V Pin 50 mA |
Flash Memory 32 KB of which 0.5 KB used by bootloader |
SRAM 2 KB |
EEPROM 1 KB |
Clock Speed 16 MHz |
Bagian-bagian Arduino UNO :
- Power USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
- Power Jack
- Crystal Oscillator
Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
- Reset
- Digital Pins I / O
- Analog Pins
- LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik.
Motor Servo merupakan motor listrik dengan menggunakan sistem closed loop. Sistem tersebut digunakan untuk mengendalikan akselerasi dan kecepatan pada sebuah motor listrik dengan keakuratan yang tinggi.
Selain itu, motor servo biasa digunakan untuk mengubah energi listrik menjadi mekanik melalui interaksi dari kedua medan magnet permanent.
Pada umumnya, motor servo terdiri dari tiga komponen utama yaitu:
- Moto
- Sistem kontrol
- Potensiometer atau encoder.
Motor berfungsi sebagai penggerak roda gigi agar dapat memutar potensiometer dan poros output-nya secara bersamaan.


- Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
- Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.

Liquid Crystal Display (LCD) adalah sebuah peralatan elektronik yang berfungsi untuk menampilkan output sebuah sistem dengan cara membentuk suatu citra atau gambaran pada sebuah layar.
Secara garis besar komponen penyusun LCD terdiri dari kristal cair (liquid crystal) yang diapit oleh 2 buah elektroda transparan dan 2 buah filter polarisasi (polarizing filter).

Keterangan:
1. Film dengan polarizing filter vertical untuk memolarisasi cahaya yang masuk.
2. Glass substrate yang berisi kolom-kolom elektroda Indium tin oxide (ITO).
3. Twisted nematic liquid crystal (kristal cair dengan susunan terpilin).
4. Glass substrate yang berisi baris-baris elektroda Indium tin oxide (ITO).
5. Film dengan polarizing filter horizontal untuk memolarisasi cahaya yang masuk.
6. Reflektor cahaya untuk memantulkan cahaya yang masuk LCD kembali ke mata pengamat.
Sebuah citra dibentuk dengan mengombinasikan kondisi nyala dan mati dari pixel-pixel yang menyusun layar sebuah LCD. Pada umumnya LCD yang dijual di pasaran sudah memiliki integrated circuit tersendiri sehingga para pemakai dapat mengontrol tampilan LCD dengan mudah dengan menggunakan mikrokontroler untuk mengirimkan data melalui pin-pin input yang sudah tersedia.


f. LED
Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung pada jenis bahan semikonduktor yang dipergunakannya. LED juga dapat memancarkan sinar inframerah yang tidak tampak oleh mata seperti yang sering kita jumpai pada Remote Control TV ataupun Remote Control perangkat elektronik lainnya.

Cara Kerja LED (Light Emitting Diode)
LED merupakan keluarga dari Dioda yang terbuat dari Semikonduktor. Cara kerjanya pun hampir sama dengan Dioda yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda.
LED terdiri dari sebuah chip semikonduktor yang di doping sehingga menciptakan junction P dan N. Yang dimaksud dengan proses doping dalam semikonduktor adalah proses untuk menambahkan ketidakmurnian (impurity) pada semikonduktor yang murni sehingga menghasilkan karakteristik kelistrikan yang diinginkan. Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna).
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal. Jarak komunikasi yang digunakan tidak lebih dari 15 meter dengan kecepatan 20 kb/s.
Cara Kerja Komunikasi UART :

Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
Untuk membuat rangkaian pintu garasi otomatis, langkha-langkah yang dilakukan adalah
a. Cari semua komponen yang dibutuhkan
b. Menyusun semua komponen yang di butuhkan pada proteus
c. Setelah semua rangkaian tersusun, sambungkan rangkaian
d. setelah semua rangkaian tersusun, jalankan rangkaian.
e. Setelah semua rangkaian di proteus berjalan, buat prototipe nya
f. susun semua komponen sesuai dengan rangkaian yang dibuat pada proteus






Tidak ada komentar:
Posting Komentar